3D掃描中的Point Cloud 是什麼東西?

image source:meccanismocomplesso
隨着科技的不斷髮展和創新,3D掃描技術日益成熟,為我們帶來了全新的視角來解析和捕捉真實世界的場景和物件。其中最爲重要的一項技術就是3D掃描點雲(3D Point Cloud),它可能會改變我們對世界的理解,提供更廣泛的應用領域。
什麼是Point Cloud
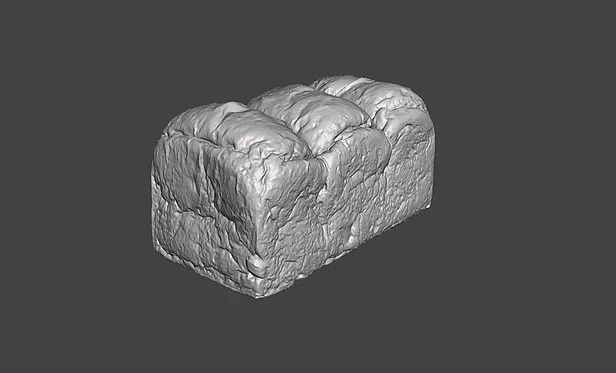
Point Cloud(點雲)是三維空間中的一組數據點,由3D掃描器產生出來,每一顆的Point Cloud都有相對的x,y,z坐標。這些Point Cloud的總和就會形成一個實物的外表。3D掃描器的軟件會將它們重構,轉換多邊形網格或三角形網格模型,NURBS曲面模型或CAD模型
3D掃描時會產生一些叫Point Cloud的東西,而Point Cloud 是用來形成3D模型的,那麼究竟3D掃描中的Point Cloud 是什麼東西呢?Point Cloud(點雲)是三維空間中的一組數據點,由3D掃描器產生出來,當3D掃描器投射白光或激光到物體表面作測量時,Point Cloud就會產生,每一顆的Point Cloud都有相對的x,y,z坐標。這些Point Cloud的總和就會形成一個實物的外表。這些點雲通過激光測距、攝像機或其他傳感器來獲取。這種點雲數據實際上是對現實世界的精確數碼化表示。

image source:wikipedia
3D掃描點雲的应用领域
3D掃描點雲的出現爲我們提供瞭解和探索現實世界的機會,它已經在多個領域得到廣泛應用,並且具有巨大的潛力,常見於下面的領域中。
工業製造:3D掃描點雲在工業製造領域中有着廣泛的應用。它可以用於檢測產品的質量、尺寸和形狀。通過掃描已有的零部件,製造商可以創建出精確的數字模型,並在設計和生產過程中進行比對。
建築和文物保護:在建築和文物保護領域,3D掃描點雲可以幫助保存和重建歷史古蹟、文化遺址和獨特建築物。通過掃描大型建築物或遺址,可以創建出準確的數碼圖像和模型,以便進行研究、保護和修復工作。
虛擬現實和增強現實:3D掃描點雲在虛擬現實和增強現實技術中扮演關鍵角色。通過將點雲數據轉換爲3D模型,可以創建出逼真的虛擬世界和體驗。這種技術正在被廣泛運用於遊戲、沉浸式娛樂和培訓領域。
醫學和生物領域:在醫學和生物領域,通過3D掃描點雲技術,可以生成出精確的人體器官和組織模型,並幫助醫生進行手術規劃、疾病診斷和治療。此外,它還可用於研究和模擬生物運動。

image source:Shining3D
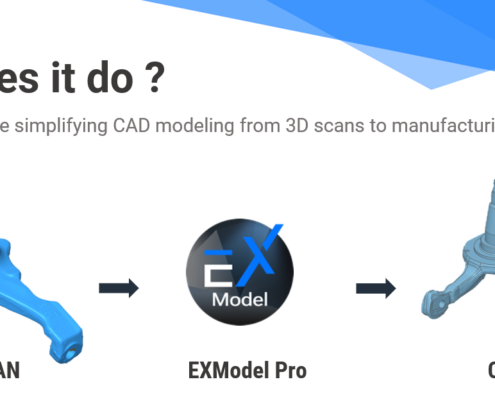
Point Cloud轉換為3D表面
有了一組Point Cloud後點,3D掃描器的軟件就會將它們重構,轉換多邊形網格或三角形網格模型,NURBS曲面模型或CAD模型。

image source:cs184team.github.io/cs184-final/
有很多技術可以將點雲轉換為3D表面。例如Delaunay三角剖分,alpha形狀和球樞轉,在點雲的現有頂點上建立三角形網絡等等。
Point Cloud轉換為3D模型後可用很多目的,包括為製造的零件,量度和質量檢查以及動畫,渲染和創建3D CAD模型等等。
在地理信息系統中,Point Cloud是用於製作地形數碼模型的來源之一。它們還用於生成城市環境的3D模型。無人機通常用於收集一系列RGB圖像,隨後可以在電腦視覺算法平台上進行處理,以製作RGB Point Cloud,從中可以進行距離和體積估計。
3D掃描點雲的挑戰和未來發展
儘管3D掃描點雲已經取得了極大的進展,但仍存在一些挑戰。首先,數據的處理和管理需要強大的計算能力和存儲空間,這需要投入大量資源。其次,對於動態場景的實時捕捉仍然是一個挑戰。
隨着計算能力的增強和硬件設備的進步,3D掃描點雲技術的未來發展前景仍然廣闊。基於大數據和AI人工智能,我們可以期待在自動駕駛、物體識別和機器人技術等領域中看到更多關於3D掃描點雲的應用。
3D掃描點雲常見問題
Q1:什麼是3D掃描點雲?
Point Cloud(點雲)是三維空間中的一組數據點,由3D掃描器產生出來,每一顆的Point Cloud都有相對的x,y,z坐標。這些Point Cloud的總和就會形成一個實物的外表。3D掃描器的軟件會將它們重構,轉換多邊形網格或三角形網格模型,NURBS曲面模型或CAD模型。
 https://3dlabstore.com.hk/wp-content/uploads/2024/06/How-can-I-get-access-to-EXModel-1.png
624
1440
3dlabstore
https://3dlabstore.com.hk/wp-content/uploads/2023/12/3dlabstore.png
3dlabstore2024-06-28 05:56:302024-07-21 13:17:23如何獲取及啟動EXModel 逆向工程軟件試用版
https://3dlabstore.com.hk/wp-content/uploads/2024/06/How-can-I-get-access-to-EXModel-1.png
624
1440
3dlabstore
https://3dlabstore.com.hk/wp-content/uploads/2023/12/3dlabstore.png
3dlabstore2024-06-28 05:56:302024-07-21 13:17:23如何獲取及啟動EXModel 逆向工程軟件試用版 https://3dlabstore.com.hk/wp-content/uploads/2024/06/BANNER-1-2-1-1-1.png
600
821
3dlabstore
https://3dlabstore.com.hk/wp-content/uploads/2023/12/3dlabstore.png
3dlabstore2024-06-10 16:14:082024-06-12 11:24:25Shining 3D 掃描器榮獲著名的紅點設計國際大獎
https://3dlabstore.com.hk/wp-content/uploads/2024/06/BANNER-1-2-1-1-1.png
600
821
3dlabstore
https://3dlabstore.com.hk/wp-content/uploads/2023/12/3dlabstore.png
3dlabstore2024-06-10 16:14:082024-06-12 11:24:25Shining 3D 掃描器榮獲著名的紅點設計國際大獎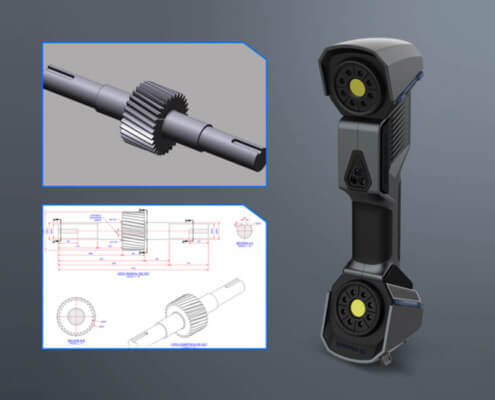 https://3dlabstore.com.hk/wp-content/uploads/2024/04/Freescan-UE11.jpg
650
1134
labstore
https://3dlabstore.com.hk/wp-content/uploads/2023/12/3dlabstore.png
labstore2024-04-29 17:47:492024-04-30 12:34:19使用測量級 FreeScan UE 11 進行 3D 掃描和模擬分析
https://3dlabstore.com.hk/wp-content/uploads/2024/04/Freescan-UE11.jpg
650
1134
labstore
https://3dlabstore.com.hk/wp-content/uploads/2023/12/3dlabstore.png
labstore2024-04-29 17:47:492024-04-30 12:34:19使用測量級 FreeScan UE 11 進行 3D 掃描和模擬分析 https://3dlabstore.com.hk/wp-content/uploads/2024/04/Einstar-3D-Software-EXStar-v1_2-software.jpg
576
1081
3dlabstore
https://3dlabstore.com.hk/wp-content/uploads/2023/12/3dlabstore.png
3dlabstore2024-04-04 18:45:572024-04-24 12:22:39Einstar 3D掃描器最新操作軟件EXStar v1.2 詳細介紹-帶來更多優化及強勁功能
https://3dlabstore.com.hk/wp-content/uploads/2024/04/Einstar-3D-Software-EXStar-v1_2-software.jpg
576
1081
3dlabstore
https://3dlabstore.com.hk/wp-content/uploads/2023/12/3dlabstore.png
3dlabstore2024-04-04 18:45:572024-04-24 12:22:39Einstar 3D掃描器最新操作軟件EXStar v1.2 詳細介紹-帶來更多優化及強勁功能 https://3dlabstore.com.hk/wp-content/uploads/2022/11/3D掃描器推薦-2022-5.jpg
321
600
3dlabstore
https://3dlabstore.com.hk/wp-content/uploads/2023/12/3dlabstore.png
3dlabstore2023-08-29 17:48:142023-08-29 17:57:283D掃描器推薦 2023
https://3dlabstore.com.hk/wp-content/uploads/2022/11/3D掃描器推薦-2022-5.jpg
321
600
3dlabstore
https://3dlabstore.com.hk/wp-content/uploads/2023/12/3dlabstore.png
3dlabstore2023-08-29 17:48:142023-08-29 17:57:283D掃描器推薦 2023 https://3dlabstore.com.hk/wp-content/uploads/2020/06/逆向工程是什麼及有什麼應用呢.jpg
437
762
labstore
https://3dlabstore.com.hk/wp-content/uploads/2023/12/3dlabstore.png
labstore2023-08-28 09:04:572023-08-30 11:05:27逆向工程是什麼及有什麼應用呢?
https://3dlabstore.com.hk/wp-content/uploads/2020/06/逆向工程是什麼及有什麼應用呢.jpg
437
762
labstore
https://3dlabstore.com.hk/wp-content/uploads/2023/12/3dlabstore.png
labstore2023-08-28 09:04:572023-08-30 11:05:27逆向工程是什麼及有什麼應用呢? https://3dlabstore.com.hk/wp-content/uploads/2023/08/Shining3D新品Einscan-H2閃亮登場-.jpg
281
500
Jerry
https://3dlabstore.com.hk/wp-content/uploads/2023/12/3dlabstore.png
Jerry2023-08-15 16:33:152023-08-16 16:46:00Shining3D新品Einscan H2閃亮登場!
https://3dlabstore.com.hk/wp-content/uploads/2023/08/Shining3D新品Einscan-H2閃亮登場-.jpg
281
500
Jerry
https://3dlabstore.com.hk/wp-content/uploads/2023/12/3dlabstore.png
Jerry2023-08-15 16:33:152023-08-16 16:46:00Shining3D新品Einscan H2閃亮登場! https://3dlabstore.com.hk/wp-content/uploads/2023/05/竟有適用於所有物體尺寸的高性價互補掃描方案?1.png
450
800
Jerry
https://3dlabstore.com.hk/wp-content/uploads/2023/12/3dlabstore.png
Jerry2023-05-10 19:07:322023-05-10 20:00:52Einscan SE V2 加Einstar,竟有適用於所有物體尺寸的高性價3D掃描方案?
https://3dlabstore.com.hk/wp-content/uploads/2023/05/竟有適用於所有物體尺寸的高性價互補掃描方案?1.png
450
800
Jerry
https://3dlabstore.com.hk/wp-content/uploads/2023/12/3dlabstore.png
Jerry2023-05-10 19:07:322023-05-10 20:00:52Einscan SE V2 加Einstar,竟有適用於所有物體尺寸的高性價3D掃描方案?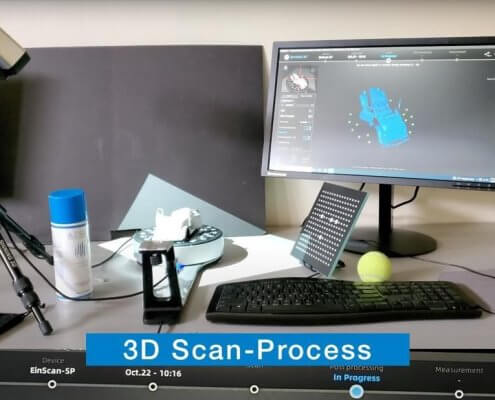 https://3dlabstore.com.hk/wp-content/uploads/2023/04/各種不同的3D掃描技術原理知多點_2.jpg
586
1024
labstore
https://3dlabstore.com.hk/wp-content/uploads/2023/12/3dlabstore.png
labstore2023-04-19 10:50:032023-12-03 15:50:41各種不同的3D掃描技術原理知多點
https://3dlabstore.com.hk/wp-content/uploads/2023/04/各種不同的3D掃描技術原理知多點_2.jpg
586
1024
labstore
https://3dlabstore.com.hk/wp-content/uploads/2023/12/3dlabstore.png
labstore2023-04-19 10:50:032023-12-03 15:50:41各種不同的3D掃描技術原理知多點



License: The text of “3D掃描中的Point Cloud 是什麼東西?” by 3D Lab Store is licensed under a Creative Commons Attribution 4.0 International License.